
After getting inspired by the amazing single-servo walking and rolling robots built by erco at www.robotrebels.org, I decided to have a go at designing my own version of the single-servo walker.
I designed mine as a “quadruped”… I guess it’s a quadruped? It has 4 contact points to the ground. Typical of me, I made my using 3D printed parts, since I love my 3D printer.
This is my initial attempt at this design. I managed to get it to walk, but it took some tweaking… I learnt a lot from this build, and will be refining the design to make an updated version. (I’ll post the 3D printable files to Thingiverse after I get it right! 🙂 )
Here’s a closer look at the four 3D-printed parts:
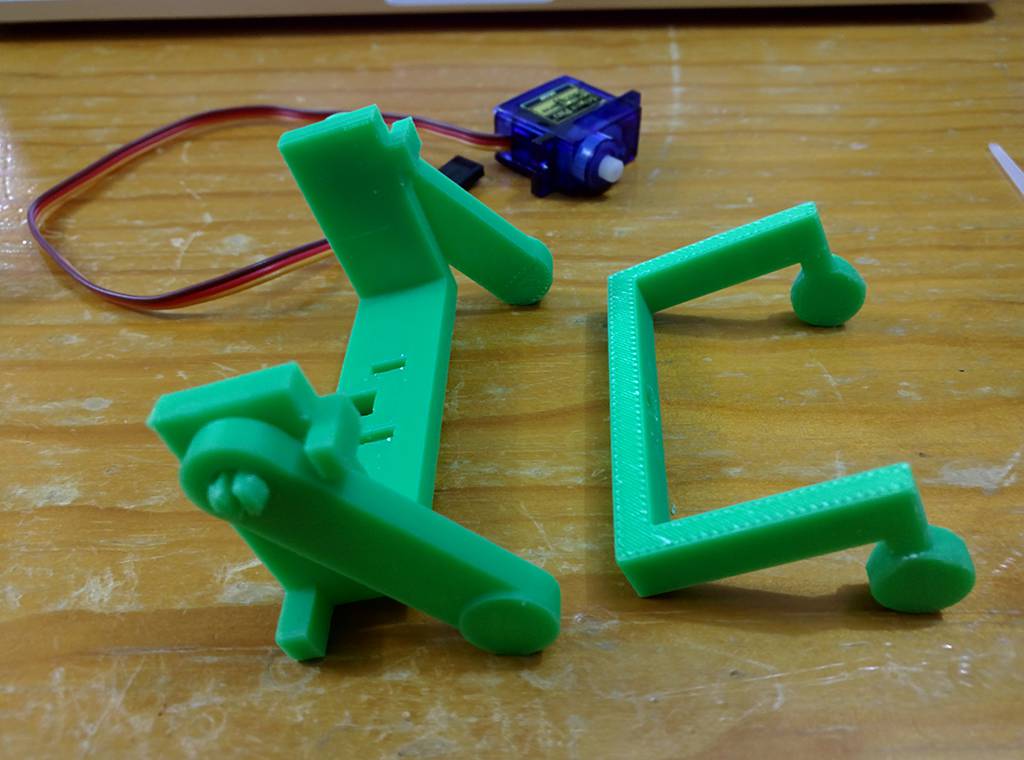
The parts are pretty simple. The front legs are passive! They move back and forth due to gravity. 😀
Here are some assembly photos so you can see how the parts fit together.
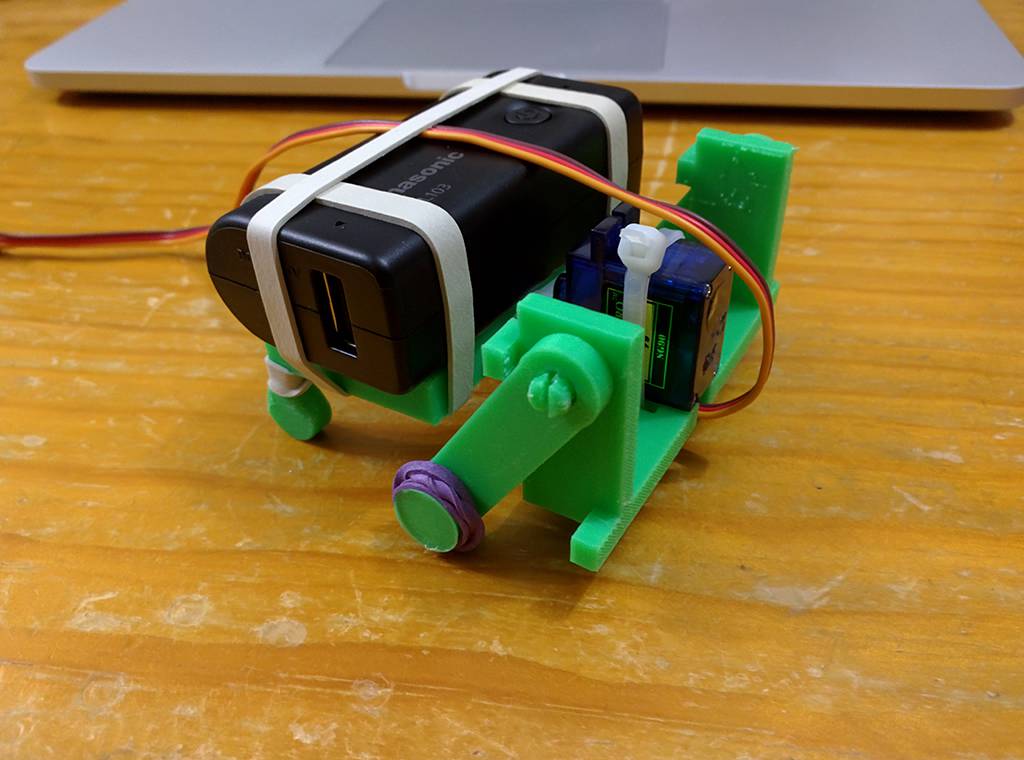

In the video, I’m just using a basic test program to get it to walk forwards.
It should be possible to get this robot to turn left and right as well! I’ll update the software to demonstrate that soon. 😀
The passive legs in this design are based on the passive legs in erco’s single servo walker. See a video of erco’s fantastic design here:
I’m really impressed and amazed at these one servo walkers!! I’ll be doing more work on my design (both software and hardware) and will post an update soon.
As I mentioned before, once I have it walking well, I’ll put the 3D printable files onto Thingiverse.